AI has the potential to revolutionize education by personalizing learning, providing students with around-the-clock support, and making learning more engaging. By addressing the challenges and using AI responsibly, educators can harness this powerful technology to create a more effective and equitable learning environment for all students.
- In the ‘About’ section of this post is an overview of the issues or challenges, potential solutions, and web links. Other sections have information on relevant legislation, committees, agencies, programs in addition to information on the judiciary, nonpartisan & partisan organizations, and a wikipedia entry.
- To participate in ongoing forums, ask the post’s curators questions, and make suggestions, go to the ‘Discuss’ section at the bottom of the post.
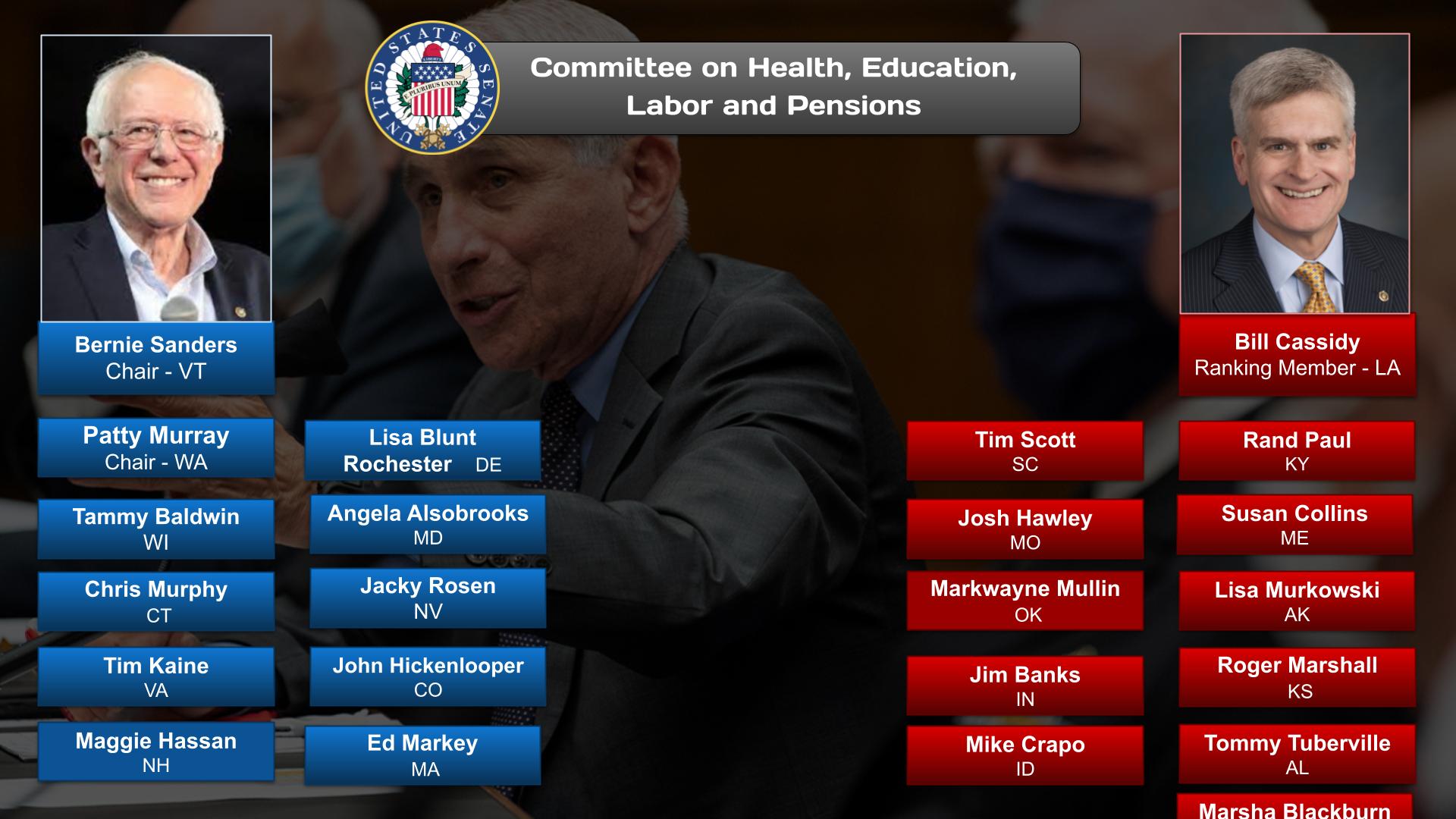
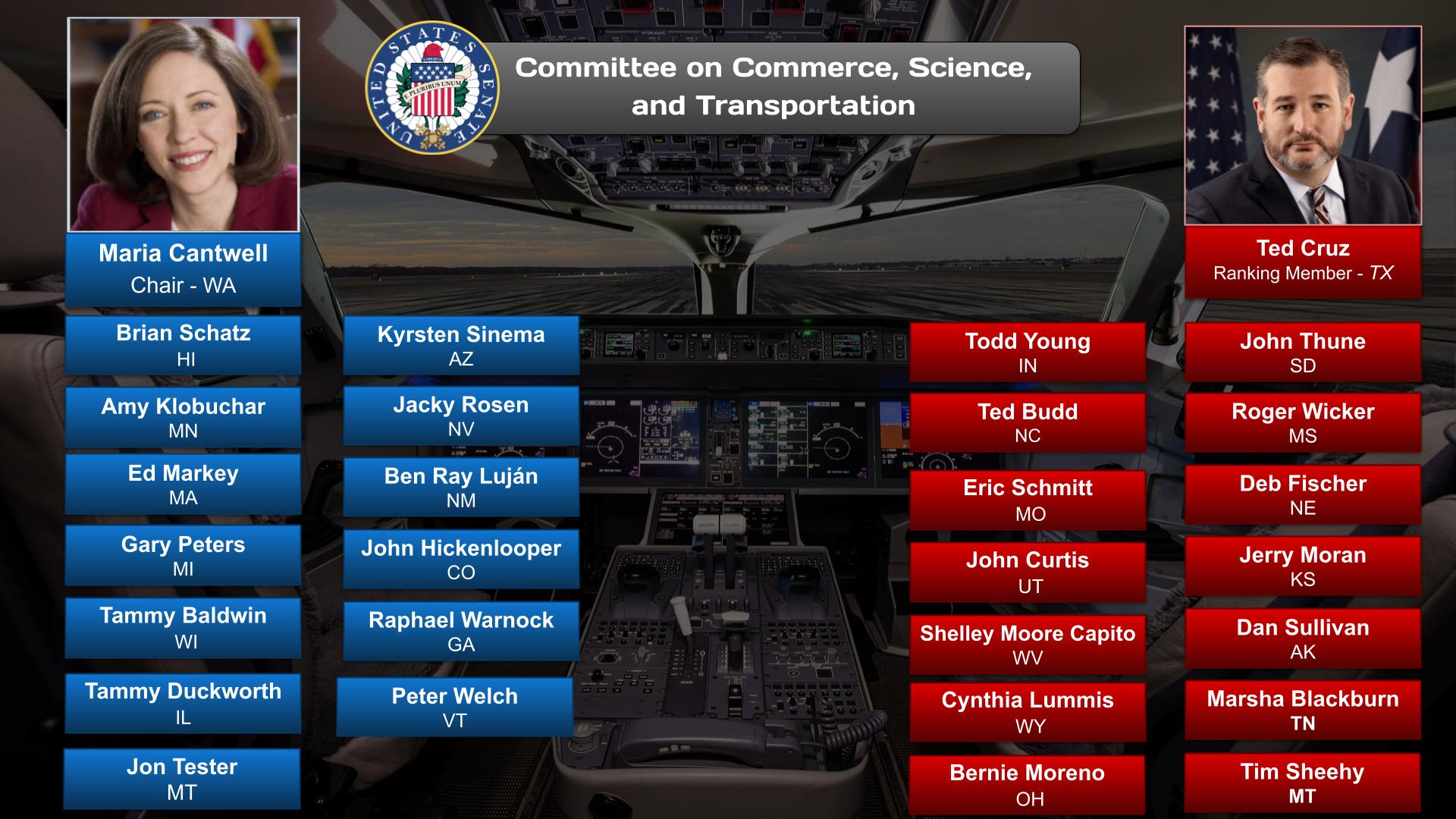
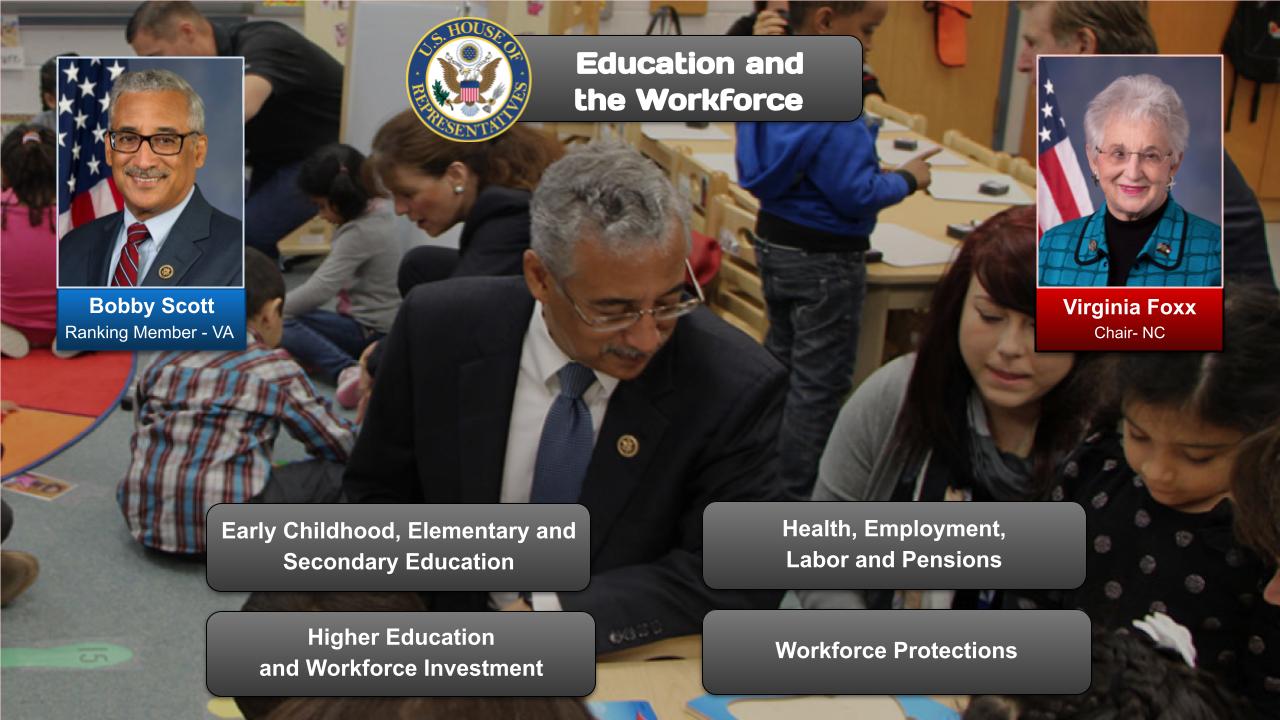
The AI in Education category has related posts on government agencies and departments and committees and their Chairs.
Check the Education post for the party positions, committees, government agencies related to AI in Education issues.
To participate in ongoing forums, ask the post’s curators questions, and make suggestions, scroll to the ‘Discuss’ section at the bottom of each post or select the “comment” icon.
TED – 01/05/2023 (15:36)
https://www.youtube.com/watch?v=hJP5GqnTrNo
Sal Khan, the founder and CEO of Khan Academy, thinks artificial intelligence could spark the greatest positive transformation education has ever seen. He shares the opportunities he sees for students and educators to collaborate with AI tools — including the potential of a personal AI tutor for every student and an AI teaching assistant for every teacher — and demos some exciting new features for their educational chatbot, Khanmigo.
OnAir Post: AI in Education